Machine building
BFP automation est active depuis 2010. De nombreux instruments personnalisés ont été construits au fil des années pour les industries des boissons, de l'emballage, du bois et de l'agriculture. Malheureusement, des clients comme AB InBev, BP, Solvay et d'autres nous empêchent de partager nos créations car nous sommes liés par un accord de confidentialité que nous respectons bien entendu.
Pour la construction de machines, nous faisons appel à nos partenaires réguliers CTRL-Matic et Cloud-Consulting depuis près de 10 ans.
3D Fruit Sorter avec Cognex laser camera
Fiche produit Fruit Sorter avec 3D Vision camera

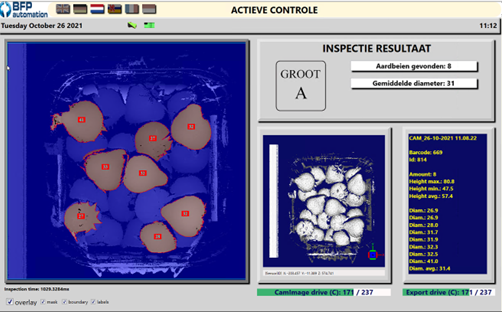
CLASSIFICATION ET ENREGISTREMENT DES BARQUETTES AUX FRAISES
Le FruitSorter 3D se compose d'une caméra laser 3D qui classe une barquette remplie de fraises en fonction du diamètre mesuré. La technique de visualisation 3D est capable de créer une image de haute qualité facile à traiter avec les outils de vision, à partir de laquelle un tri peut être réalisé selon les classes de tri :
Large 2A : diamètre fraise > 35mm
Large A : diamètre fraise entre 31 -35mm
Small : diamètre fraise inférieur à 31mm
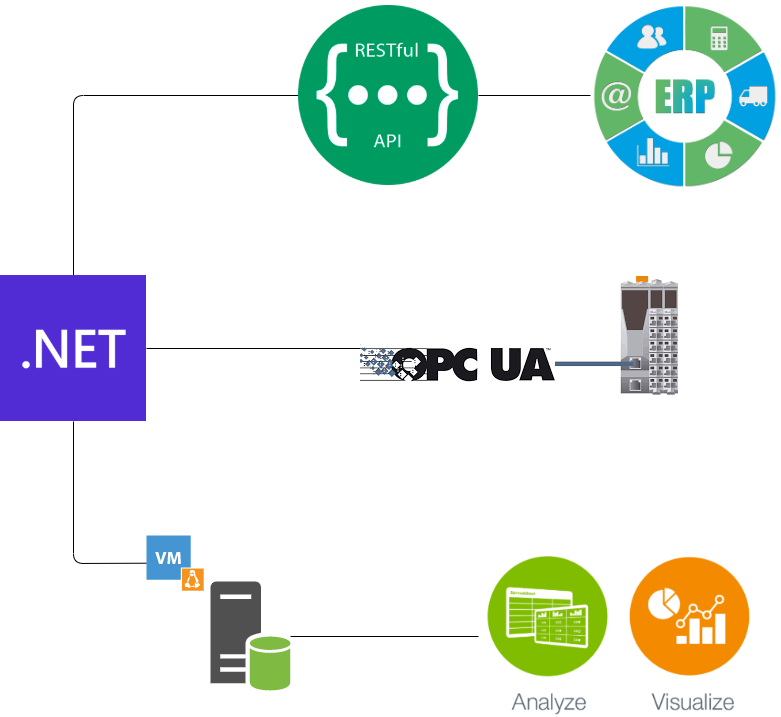
Le boîtier Vision effectue la mesure du diamètre des fraises situées en haut de la barquette. Plusieurs combinaisons d'algorithmes de vision sont utilisées pour cela. Le résultat de la classification est communiqué via une connexion Profinet au contrôle parent afin que le résultat final puisse être enregistré dans une base de données SQL.
Le poids brut est déterminé de manière synchrone avec le balayage et des paramètres spécifiques sont extraits du système d'enregistrement via des codes-barres, tels que le type de barquette avec le poids de tare associé, le numéro d'expérience, le numéro d'objet et la répétition. En fonction du paramètre TakeAside, l'imprimante en ligne marque une barquette avant qu'elle ne soit déviée vers la voie de tri pour examen ou révision.
Synchroon met de scanning wordt het bruto gewicht bepaald en via barcodes haalt men specifieke parameters uit het registratiesysteem zoals het type punnet met bijhorend tarra-gewicht, het experimentnummer, het objectnummer en de herhaling. Afhankelijk van de TakeAside-parameter markeert de inline printer een punnet alvorens die afgeleid wordt naar de sorteerbaan voor onderzoek of nazicht.