Machine building
BFP automation is actief sinds 2010. Er zijn veel op maat gemaakte instrumenten gebouwd door de jaren heen voor de drank-, verpakkings-, hout- en de agrarische industrie, dit zowel voor productieomgevingen, laboratoria en R&D als onderzoekcentra. Helaas weerhouden klanten als AB InBev, BP, Solvay en anderen ons ervan onze ontwerpen te delen, omdat we gebonden zijn aan een geheimhoudingsovereenkomst die we uiteraard respecteren.
Voor machinebouw doen we al bijna 10 jaar beroep op onze vaste partners CTRL-Matic en Cloud-Consulting.
3D Fruit Sorter met Cognex laser camera
Product fiche Fruit Sorter met 3D Vision camera

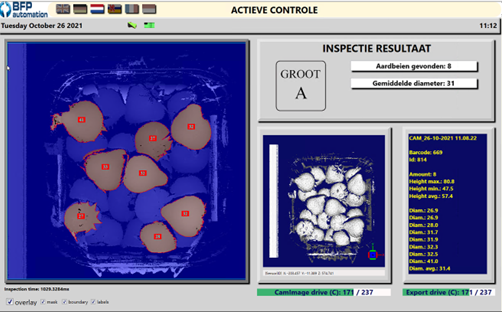
KLASSEBEPALING EN REGISTRATIE VAN AARDBEI PUNNETS
De 3D FruitSorter bestaat uit een 3D lasercamera die een gevulde punnet met aardbeien classificeert op basis van de gemeten diameter. De 3D visualisatietechniek is in staat om een kwalitatief hoogwaardig beeld te maken dat goed verwerkbaar is met de visietools waaruit een sortering kan gerealiseerd worden volgens de sorteringsklassen:
-
Groot 2A: aardbei diameter > 35mm
-
Groot A: aardbei diameter tussen 31-35mm
-
Klein: aardbei diameter kleiner dan 31mm
De Vision-unit voert de diametermeting uit op aardbeien die zich aan de bovenkant van de punnet bevinden. Hiervoor worden meerdere combinaties van visiealgoritmes ingezet. Het resultaat van de classificatie wordt via een Profinet verbinding naar de bovenliggende besturing gecommuniceerd zodat het eindresultaat in een SQL-database kan geregistreerd worden.
Synchroon met de scanning wordt het bruto gewicht bepaald en via barcodes haalt men specifieke parameters uit het registratiesysteem zoals het type punnet met bijhorend tarra-gewicht, het experimentnummer, het objectnummer en de herhaling. Afhankelijk van de TakeAside-parameter markeert de inline printer een punnet alvorens die afgeleid wordt naar de sorteerbaan voor onderzoek of nazicht.